
This is a hobby project my kids and me started around Apr’2023. The trigger was to help their mom move an LPG cylinder from point A to point B with ease. The immediate solution was to use a wheeled cylinder stand, which pretty much their mom solved by herself, but curiosity creeped in, and ideas poured in on can we make a robot to do that automatically? Though that would be a very complex project for the kids we nevertheless thought let’s see how far we can get.
Initially they came up with using the same wheeled cylinder holder and mechanizing it using some kind of motors and Arduino board. Excitement was always on how to do the automated movement of the cylinder stand. Not much thought was given to the load baring capacity of the “robot” in those initial days.
So, the journey of developing an autonomous light weight transportation vehicle began.
Take 1:





Conclusion from the first experiment was that we need a stronger frame/chassis in addition to the aspirational autonomous navigation and motor control. The cylinder holder was not suitable to hold the sensors, electronic board and did not also have adequate support for the wheel drive motors.
Take 2:
In order to gain some more insights before going with the 50kg payload, we decided to reduce the payload to a few kgs and see if we could develop another prototype that could help move the payload from Point A to Point B. We bought an off-the-shelf six wheeled robotic frame and assembled it.
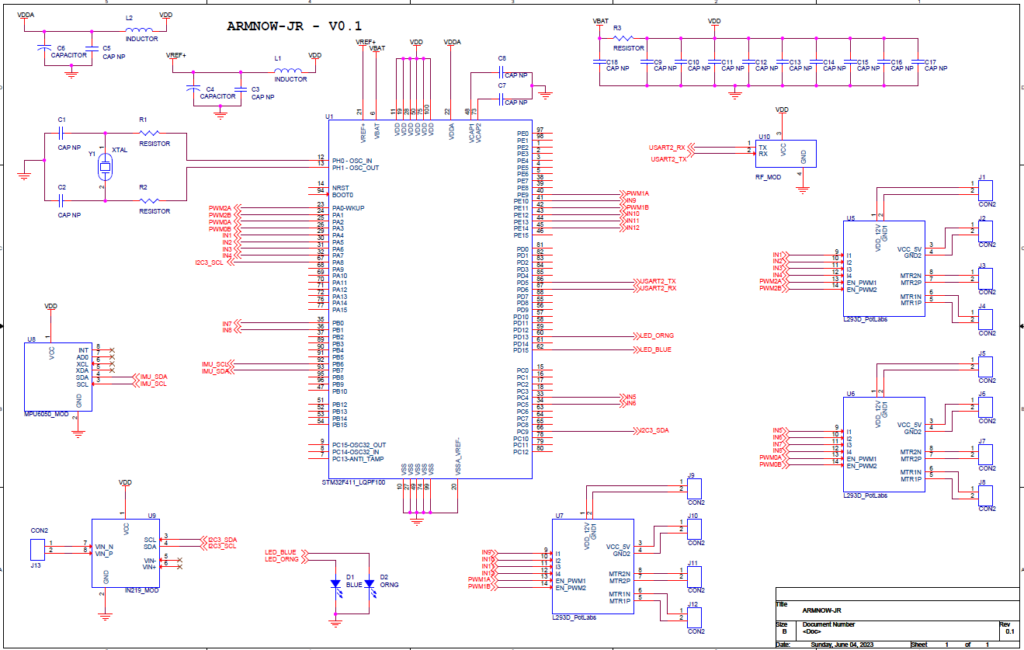
The wiring

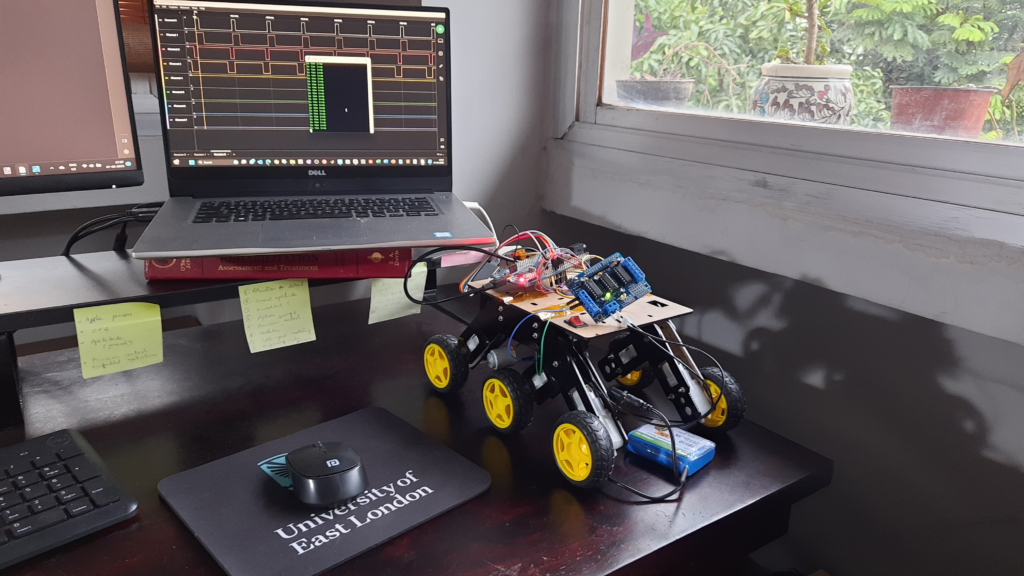
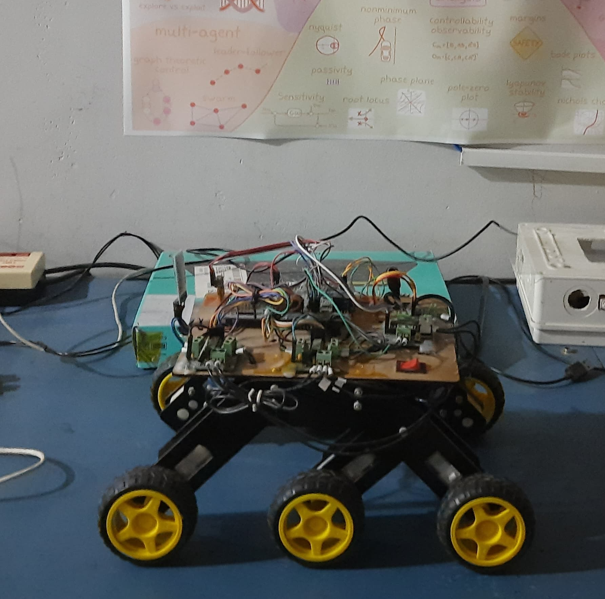



Some insights gained from Proto-2
- Weight pushes the wheels outward which needs to be compensated in the structural design
- Load increases power consumption, hence, reduces the battery capacity
- During motion there is energy accumulated in the load which translates as a jerky motion. This jerky motion adds small path deviations in the robot’s travel path. This will have to be compensated in some form
- The same with screw-nut fixtures. The jerky motion loosens the screws and make the wheels to wobble and dislocate. This also adds to the deviation from planned travel path
- Wheel control has to be more precise and measurable (feedback) to ensure adherence to planned path
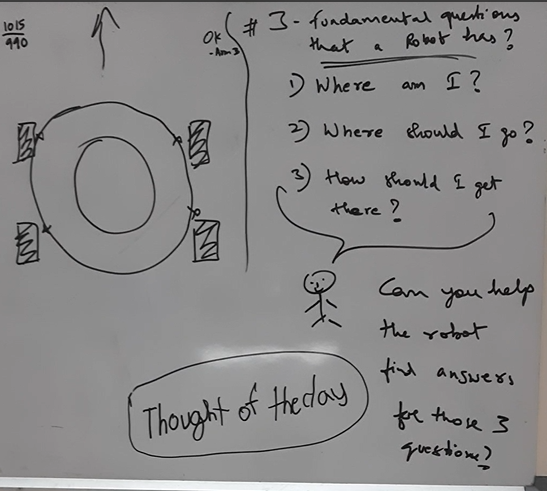
October 26, 2024:
We expedite the development we decided to replace the existing STM32 board with a Raspberry Pi 4 board. This would give us access to a more advanced Operating System and also multiple interfaces like USB and Ethernet. This also would allow us easy interface to a camera.
Leave a Reply