
This is another experiment I did to try auto tuning of the PID controller. I used Matlab System Identification toolbox to estimate the transfer function of the System of Interest (SoI).
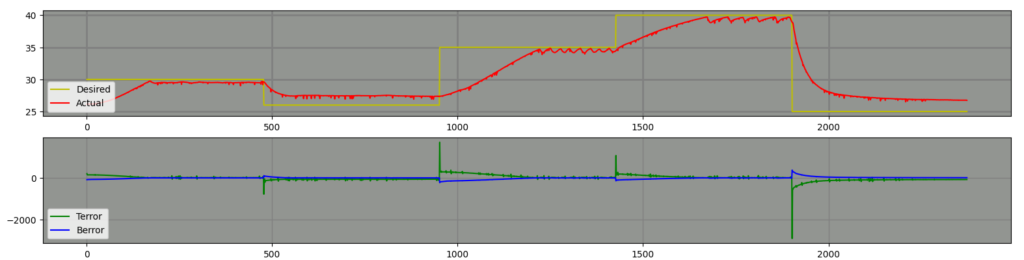
If you notice, right now for the system structure I assembled and the gains I initialized, the actual state never reaches the desired level, however it oscillates closer to the desired state. It also doesn’t settle at the base state. This steady state error needs to be fixed.
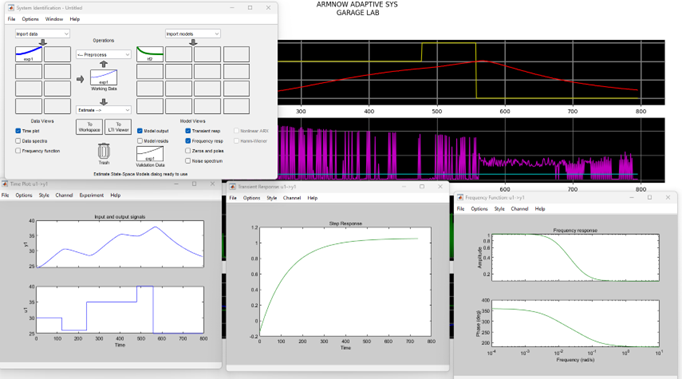
One conclusion from this experiment was that since the system structure involves multiple internal and external factors that are dynamic and non-linear (enclosure fitment variabilities, leakages in air flow, power supply design, etc.), estimating the system’s model was not possible with linear system identification methods. A more complex non-linear system identification method will be required.
The scope right now is to ensure the desired states are reached efficiently. Here by efficient I mean the rate of change of the states is quick, there is no steady state error, oscillations are minimal and there are no overshoots.
If you’re reading this, please share your thoughts and comments below. And if you plan to use any part of my work feel free to do so by a simple acknowledgement or reference to my work. Thank you for reading!
Leave a Reply